
山东矿安机电有限公司


无尾设计 | 作业灵活 | 适合狭小空间作业









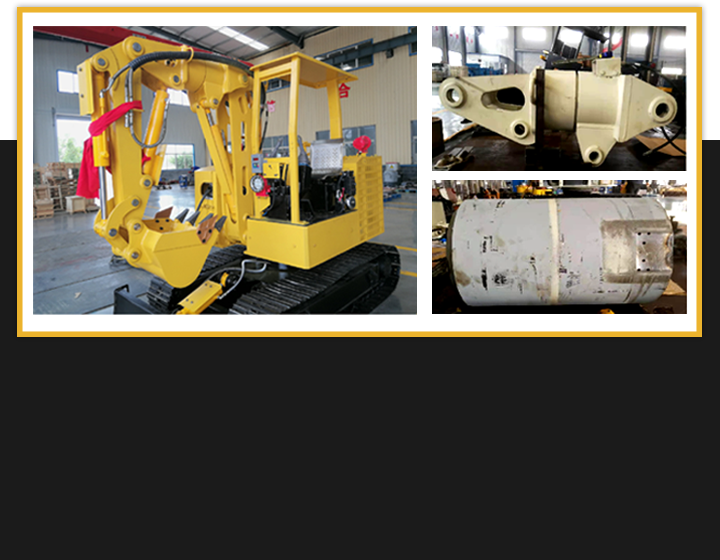
矿用液压挖掘机适用于煤矿、金属矿、非金属矿、竖井、斜井及平巷的掘进、装岩、清底及冻土层的挖掘作业;满足挖掘、卧底、扩帮、侧掏、破损、破岩、铲运、清理皮带机底部、装车、平整巷道等各种功能。
主要由行走装置、工作装置、回转机构三大部分及液压、电气两大系统组成。通过各部分的协调配合,最终由液压、电气执行元件和机械传动机构实现所规定的动作,完成各项作业过程。

行走装置及底盘:由履带架、行走马达、支重轮、托链轮、引导轮、驱动轮、履带组成,其液压行走功能是通过行走马达驱动驱动轮来完成,行走马达具有前行、后退、自动刹车三种性能。
工作装置:采用三节臂形式,由大臂、辅助臂、斗杆、挖斗、连杆、摇臂、油缸、回转油缸组成,辅助臂有可旋转、不可旋转两种,可旋转型在辅助臂臂内部加装回转油缸,可分别向左右两侧各旋转90°
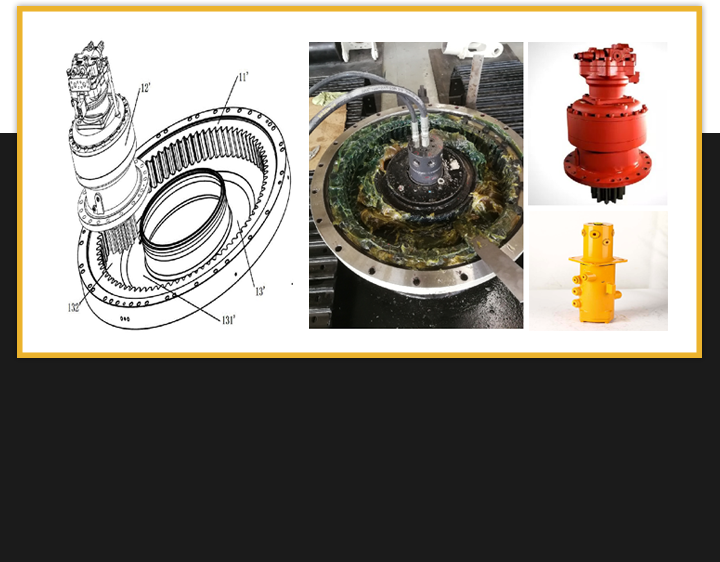
挖掘机的回转原理:由回转马达驱动回转支承旋转,回转支承内圈与底盘固定,回转支承外圈与上车架连接,在回转马达的驱动下随上车架旋转。
设计紧凑、外形尺寸合理,下井时工作装
置可回收到底盘轮廓内但便于 垂直上下井
操作者处于顶棚保护下作业
有利于安全生产
上车架机构紧凑;无尾设计
不会与因此更井壁碰撞,适用于井下
狭小空间作业
节约人工成本
提高作业效率改善了工作环境
噪声低、无尾气排放
更适用于井下使用
主要动作采用先导阀控制
操作轻松简单,工作平稳无冲击
负载敏感系统是一种感受系统压力-流量需求,且仅提供所需求的流量和压力的液压回路。负载敏感控制系统的功率损耗较低,效率远高于常规液压系统。高效率、功率损失小意味着燃料的节省以及液压系统较低的发热量。
先导控制方式是由先导阀等导入的压力进行控制的方式。所有操作杆都可以用指尖力量控制,操作舒适。
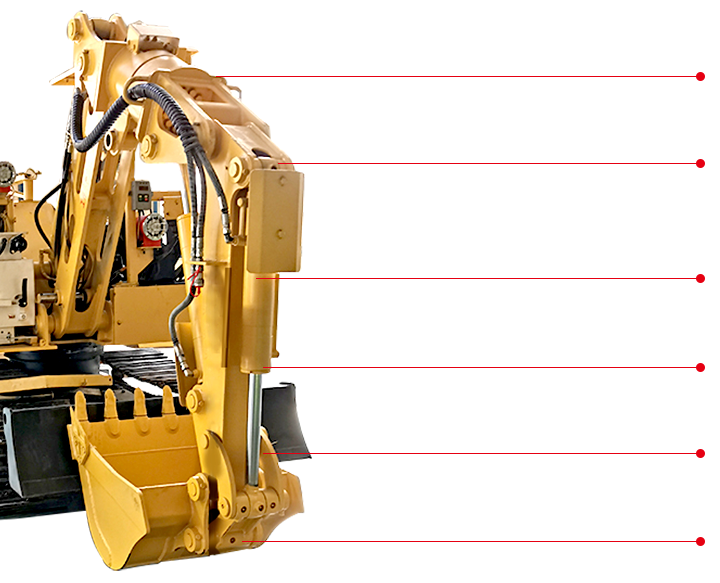
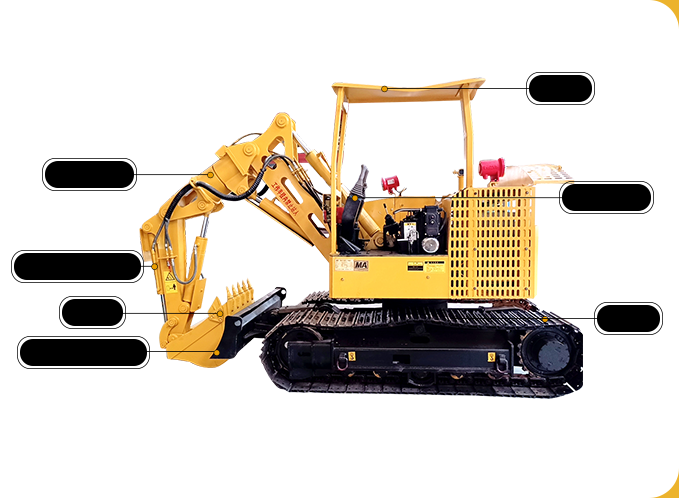 机械臂
液压伸缩杆
挖斗
可调推土铲
顶棚
机械手柄
履带
机械臂
液压伸缩杆
挖斗
可调推土铲
顶棚
机械手柄
履带
| 序号 | 规 格 | 单位 | 型 号 | ||
| MWD6.4/0.28L | MWD2.0/0.12L | ||||
| 1 | 工作重量±5% | Kg | 6460±323 | 2050±102 | |
| 2 | (长x宽x高) | mm | 3350X1550X2880 | 2788X1200X2620 | |
| 3 | 泵电机 | 额定功率 | Kw | 37 | 18.5 |
| 额定转速 | r/min | 1480 | 1480 | ||
| 4 | 液压系统 参数 |
额定压力 | MPa | 25±0.2 | 20±0.2 |
| 液压主泵最大流量 | L/min | 110±2 | 46±2 | ||
| 5 | 整机 性能 参数 |
爬坡能力 | (±°) | ±16 | ±16 |
| 接地比压 | MPa | ≤0.05 | ≤0.05 | ||
| 行走速度 | m/min | 40±3 | 32±3 | ||
| 挖掘力 | KN | ≥40 | ≥20 | ||